
We’re excited for another guest post from Kim Martini here at DSN (read previous posts here). Kim is a physical oceanographer working at the University of Alaska, Fairbanks. She is part of a science team in the Arctic for a two-week cruise to study the currents in the Chukchi Sea. You can find her on Twitter at @rejectedbanana. Make sure to comment below and welcome her to DSN.
Five days into the cruise and we have now chucked a veritable zoo of instruments into the ocean to study the currents in the Chukchi Sea. While it may seem crazy to throw so much stuff overboard, each instrument allows us to see the ocean in a different way. Combining the data from these various instruments we hope to not only understand where water is carried northward into the Arctic Ocean by these currents, but also how the currents themselves evolve over time. In this post I’ll be introducing a couple of species in our instrument zoo and talk about some of the behaviors of the currents we are studying.
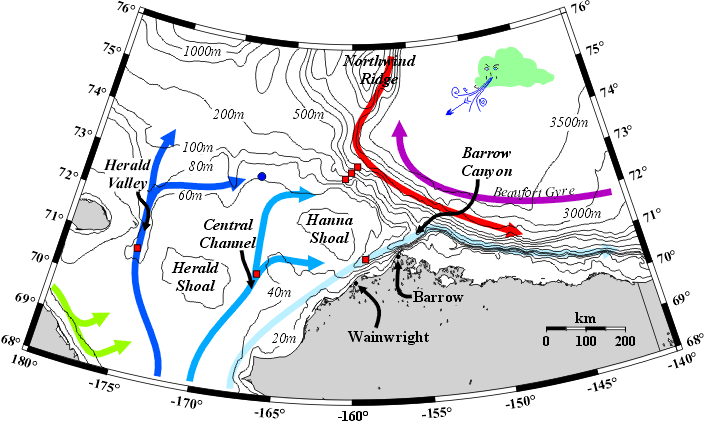
Before heading out to sea, we had a pretty good idea of what the surface currents off Barrow looked like because we have a land-based high frequency (HF) radar system that measures them. The system is pretty slick, it works by bouncing high-frequency radar off waves on the sea surface to measure the speed and direction of the surface currents. But the system does have its limitations, especially in the Arctic. HF radar tends not to work so well when there is ice or even when the Aurora is really strong. In addition, the HF radar only measures currents at the surface, so we don’t exactly know what is going on below. Deeper water could be travelling with the surface currents, or they could be going in the complete opposite direction.

So we pulled out some other instruments from our toolkit to verify which way the current were headed. The first were surface drifters. These basketball-sized globes float and drift with the surface currents. Each drifter is deployed with a “drogue”, a glorified umbrella that hangs beneath the surface float and forces the drifter to be dragged with the ocean current rather than be pushed by the wind. What still blows my mind is that we track these little gizmos with satellites. Satellites that are in SPACE! Every hour, they send out their coordinates while we sit comfortably with coffee in our lab watching them float away on Google maps. You can check out their sometimes squiggly tracks here
But we still didn’t know what was going on below the surface. So we decided to send out underwater robots to follow the drifters. You heard me right, we frickin’ deployed oceanographic robots! Our robots are formally known as gliders because of the way they fly through the water, but ocean robots just sounds so much more badass. The robots fly up and down in a zigzag pattern by changing their buoyancy, measuring different sea water properties. While piloted by other scientists onshore, our robots are fairly smart and can navigate themselves independently to a specified location. But sometimes they can run into trouble if caught in an eddy or strong current and need little corrective nudges from the pilots onshore.

And what happened after we deployed the drifters was wild. Normally, because of the winds and waves, drifters tend to disperse or spread out from each other. But when we went to recover them 3 days later, we found out them in exactly the same size cluster as when we had deployed them. Not what we expected at all.
This may be because we deployed them in the Alaska Coastal current, which was screaming that day. Speeds over 4 knots were observed! In ocean terms, this was incredibly fast. Faster than even the Gulf Stream off the eastern shore of the US. But then again, the other group of drifters we deployed (and did not pick up) in the ‘slower’ region also remained in a clump.
We are still trying to sort out exactly why the drifters moved the way they did. But since we picked up the drifters (which isn’t normally done but we did it because they were so conveniently clumped), we are just dumping them back in the water. And we will get a rare chance to repeat our initial experiment. Awesome.


Hi, I was impressed by your drogue design and wondering if you could give me any details on the construction, matterials and approximate cost? I am working on a small scale deployment of drifters to map sediment and nutrinet plumes from a river mouth.
Thanks
Sam
Hi Kim, welcome to DSN. Your articles will add even more to this fascinating website.
Hi Sam! We actually use off-the-shelf microstar drifters. More info here:
http://www.pacificgyre.com/microstar-gps-drifter.aspx
-Kim
Hi Sam, I am part of the project with Kim. We purchase our drifters from Pacific Gyre. These include a satellite transmitter and GPS device and are probably a bit expensive (~$2500) for you. However, you can build your own fairly inexpensively if you forgo the electronics. You want to try to have the subsurface drogue area much greater than the surface expression of the drifter. (I think the general rule of thumb is about 40:1) to insure that the drifter’s movement is primarily due to the current and not the wind at the surface. I’ve made these eons ago by building a frame from simple PVC pipe and threaded T-connectors. Once you have the frame (as an orthogonal structure) you can simply use cloth (I used Gortex) and sewed these around the frame. If you are clever enough you can design your frame so that it folds together when not in use. You may want to add some lead weights to the bottom of the frame for ballasting. I recommend that you put several drifters out together and let them disperse. Tracking them will be the trick. If you simply deploy them using a small surface float and stay with them, you can use a hand-held GPS device to get positions periodically. This may mean running around in your skiff and getting frequent positions so you know where they are. This of course will not work if you want to do this for a long period of time; say over the course of several days. I believe that there are some models that you can track from shore through time (as long as the drifters do not get too far away).
Thanks Tom and Kim,
I actually have 3 options in mind already for the traking and will be running some trials to test each one. They are all based around relatively cheap existing GPS devices
– Spot Messenger set to track mode
– Garmin Astro dog tracking collars
– GPS/GSM vheicle trackers using Trace Orange tracking website.
Now im working on the float and drogue. Will probably be similar to the microstar but using perspex pannels for the drogue as I’m not very handy on a sewing machine.